A nivel industrial tenemos aplicaciones muy variables en cuanto a la demanda de potencia, si el motor se ha diseñado con un factor de servicio por arriba de 1 este se puede sobrecargar durante cortos períodos de tiempo sin daño térmico a los devanados, el rotor o rodamientos. Algunos motores se inician y detienen a menudo, mientras que otros se cargan ligeramente durante algún tiempo y la carga aplicada puede variar en gran medida. Si hay períodos de tiempo en el que el motor está operando a menos de plena carga, entonces puede ser posible dimensionar el motor más pequeño que el nivel de carga máxima.

Es posible utilizar un motor que está clasificado por debajo del nivel máximo de potencia requerida, la ventaja obvia es el costo inicial, sin embargo la vida útil también será menor. Si se utiliza un motor más grande, la mayor parte del ciclo de trabajo este puede estar funcionando ligeramente cargado, y por lo tanto a un factor de eficiencia y menor consumo de energía, recordemos que un motor es más eficiente cuando la carga está cerca de plena carga. Un ciclo de trabajo intermitente es cuando existen períodos de carga y sin carga y/o de descanso. Existen preocupaciones obvias con el calentamiento del motor si tiene un ciclo de trabajo intermitente, si este se pone en marcha demasiadas veces seguidas, sin tiempo suficiente para que se enfríe, tanto el rotor como el devanado pueden sufrir prematuramente.
Para aplicaciones con un ciclo de trabajo repetitivo, la carga varía a intervalos de tiempo específicos, no obstante las cargas reales pueden variar ampliamente, desde casi sin carga a más de plena carga, un ejemplo de este tipo de aplicación sería una máquina de moldeo por inyección.
Para determinar la carga RMS en el motor, utilice la siguiente ecuación.
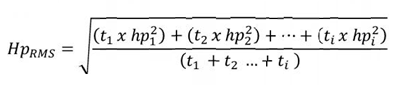
hp = carga, en caballos de fuerza, para cada parte del ciclo.
ti = tiempo, en segundos, que el motor está sujeto a cargar hpi.
Mientras la potencia RMS no exceda de la potencia de plena carga del motor utilizado en la aplicación, el motor no debe sobrecalentarse, esto por supuesto, sólo es cierto siempre y cuando haya una ventilación adecuada durante todo el ciclo.
Para dimensionar correctamente necesitará saber la duración y la potencia de carga para cada uno. Es útil dibujar un gráfico que muestra la potencia requerida en función del tiempo, que se muestra en la Gráfica #1, así como una tabla que enumera cada vez y caballos de fuerza, que se muestra en la Tabla #1.
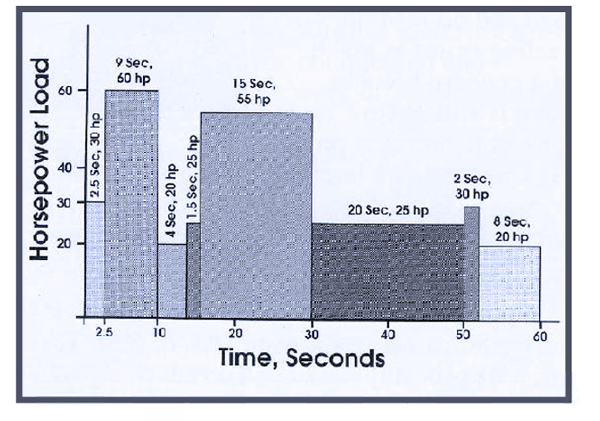
Tabla #1
| Part | time sec. | Horsepower load, hp | hp2 | hp2 x t |
|---|---|---|---|---|
| 1 | 2.5 | 30 | 900 | 2250 |
| 2 | 7 | 60 | 3600 | 25200 |
| 3 | 4 | 20 | 400 | 1600 |
| 4 | 1.5 | 25 | 625 | 937.5 |
| 5 | 15 | 55 | 3025 | 45375 |
| 6 | 20 | 25 | 625 | 12500 |
| 7 | 2 | 30 | 900 | 1800 |
| 8 | 8 | 20 | 400 | 3200 |

En este caso, la potencia RMS es 39,3 ,es decir se escogerá un motor de 40HP con un factor de servicio de 1.15 o un motor de 50Hp con un factor de servicio de 1.0. Otro factor importante es verificar que el motor puede entregar el par máximo requerido, esto significa que el par máximo (BDT) debe ser mayor que el más alto par de carga en HP a lo largo del ciclo de trabajo, de no cumplir esto, el motor se puede bloquear.
Siguiendo nuestro ejemplo, 40 HP, 4 polos, diseño B tendrán un par de inversión mínima de 200% de par a plena carga (de NEMA MG-1). Para determinarel % de par necesario utilice:
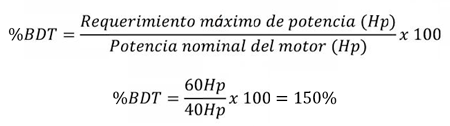
Solo se requiere de 150% del par a plena carga, es decir con el motor de diseño B y 40Hp no tendríamos problema alguno, tenga en cuenta que este tipo de análisis sólo funciona para aplicaciones en las que el ciclo de trabajo es un período relativamente corto de tiempo (5 minutos), si se excede requerirá un estudio más complicado.

